ระบบกล้ามเนื้อ

ระบบกล้ามเนื้อ
กล้ามเนื้อแบ่งเป็น 3 ชนิด คือ กล้ามเนื้อยึดกระดูก กล้ามเนื้อหัวใจ กล้ามเนื้อเรียบ

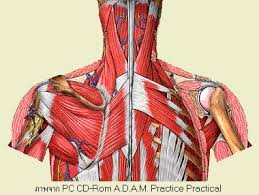
1.กล้ามเนื้อยึดกระดูก(skeleton) เป็นกล้ามเนื้อที่เกาะติดกับโครงกระดูก เช่น กล้ามเนื้อแขน กล้ามเนื้อขา จึงทำหน้าที่เกี่ยวกับการเคลื่อนไหวของร่างกายโดยตรง เมื่อนำเซลล์กล้ามเนื้อเหล่านี้มาศึกษาด้วยกล้องจุลทรรศน์จะมองเห็นเป็นแถบลาย () เซลล์กล้ามเนื้อนี้มีลักษณะเป็นทรงกระบอกยาว แต่ละเซลล์มีหลายนิวเคลียส การทำงานของกล้ามเนื้อยึดกระดูกถูกควบคุมโดยระบบประสาทโซมาติก ดังนั้นการทำงานของกล้ามเนื้อชนิดนี้ ร่างกายสามารถบังคับได้หรืออาจกล่าวว่าอยู่ในอำนาจจิตใจ
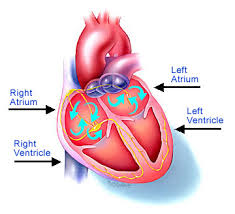
2.กล้ามเนื้อหัวใจ(cardiac muscle) เซลล์มีรูปร่างเป็นทรงกระบอก แต่สั้นกว่าเซลลืกล้ามเนื้อยึดกระดูกและเห็นเป็นลายเช่นเดียวกัน แต่ตอนปลายของเซลล์มีการแตกแขนงและเชื่อมโยงติดต่อกับเซลล์ข้างเคียง การทำงานของกล้ามเนื้อหัวใจถูกควบคุมโดยระบบประสาทอัตโนมัติ ดังนั้นร่างกายไม่สามารถบังคับได้ จึงเป็นกล้ามเนื้อที่อยู่นอกอำนาจจิตใจ

3.กล้ามเนื้อเรียบ(smooth muscle) เป็นกล้ามเนื้อที่พบอยู่ตามอวัยวะภายใน เช่น ผนังกระเพาะอาหาร ผนังลำไส้ ผนังหลอดเลือด และม่านตา เป็นต้น กล้ามเนื้อเหล่านี้ประกอบด้วยเซลล์ที่มีลักษณะยาว หัวท้ายแหลม แต่ละเซลล์มี 1 นิวเคลียส ไม่มีลายพาดขวาง การทำงานของกล้ามเนื้อเรียบถูกควบคุมโดยระบบประสาทอัตโนมัติ
โครงสร้างของกล้ามเนื้อลาย
เซลล์กล้ามเนื้อลายมีลักษณะเป็นเส้นใยยาวเรียกว่า เส้นใยกล้ามเนื้อ(musclefiber) หรือเซลล์กล้ามเนื้อ(muscle cell) อยู่รวมกันเป็นมัด ภายในเส้นใยกล้ามเนื้อจะมีเส้นใยย่อย(myofibril) กระจายอยู่ทั่วไป ภายในเส้นใยย่อยประกอบด้วยเส้นใยเล็กๆเรียกว่า เส้นใยกล้ามเนื้อเล้ก(myofilament) มีลักษณะเป็นท่อนยาวเรียงซ้อนกัน เส้นใยกล้ามเนื้อเหล่านี้จะอยู่รวมกันเป็นมัด เส้นใยกล้ามเนื้อเล้กประกอบด้วย ไมโครฟิลาเมนต์ 2 ชนิด คือ ชนิดบางซึ่งเป็นสายโปรตีนแอกทิน(actin) และชนิดหนา ซึ่งเป็นโปรตีนไมโอซิน(myosin) แอกทินและไมโอซินเรียงตัวขนานกัน
กลไกการทำงานของกล้ามเนื้อลาย นักวิทยาศาสตร์ได้ศึกษาการทำงานของเส้นใยกล้ามเนื้อมานานแล้ว แต่ยังไม่ทราบแน่ชัด ต่อมา ฮักเลย์ และ แฮนสัน ได้เสนอสมมติฐานการหดตัวของกล้ามเนื้อเกิดจากการเลื่อนตัวของแอกทินเข้าหากันตรงกลาง การเลื่อนของโปรตีนดังกล่าวทำให้เส้นใยกล้ามเนื้อหดตัว การเคลื่อนไหวในแต่ละส่วนของร่างกาย โดยกล้ามเนื้อจะทำงานรวมกันเป็นคู่ๆในลักษณะแอนตาดกนิซึม(antagonism) ได้แก่
1.กล้ามเนื้อที่ทำให้เกิดการเคลื่อนไหวงอและเหยียด
1.1กล้ามเนื้อเฟล้กเซอร์(flexor) เป็นกล้ามเนื้อที่หดกตัวแล้วทำให้เกิดการเคลื่อนไหวงอหรือพับ ได้แก่ กล้ามเนื้อไบเซพ(bicape)
1.2กล้ามเนื้อเอ็กเทนเซอร์(extenser) เป็นกล้ามเนื้อที่หดตัวแล้วทำให้เกิดการเคลื่อนไหวเหยียดตรง ได้แก่ กล้ามเนื้อไตรเซพ(tricepe)
2.กล้ามเนื้อที่ทำให้เกิดการเคลื่อนไหวไปข้างหน้าและข้างหลัง
2.1กล้ามเนื้อ protracter เป็นกล้ามเนื้อที่หดตัวแล้วทำให้เกิดการเคลื่อนไหวไปข้างหน้า
2.2กล้ามเนื้อ retracter เป็นกล้ามเนื้อที่หดตัวแล้วทำให้เกิดการเคลื่อนไหวไปข้างหลัง
3.กล้ามเนื้อที่ทำให้เกิดการเคลื่อนไหวไปด้านข้างและแนบลง
3.1กล้ามเนื้อ abductor เป็นกล้ามเนื้อที่หดตัวแล้วทำให้เกิดการเคลื่อนไหวออกจากข้างลำตัว
3.2กล้ามเนือ้ adductor เป็นกล้ามเนื้อที่หดตัวแล้วทำให้เกิดการเคลื่อนไหวแนบลำตัว

ช่วยด้วยครับ
นักเรียนที่สร้างบล็อก กรุณาอย่า
คัดลอกข้อมูลจากเว็บอื่นทั้งหมด
ควรนำมาจากหลายๆ เว็บ แล้ววิเคราะห์ สังเคราะห์ และเขียนขึ้นใหม่
หากคัดลอกทั้งหมด จะถูกดำเนินคดี
ตามกฎหมายจากเจ้าของลิขสิทธิ์
มีโทษทั้งจำคุกและปรับในอัตราสูง
ช่วยกันนะครับ
ไทยกู๊ดวิวจะได้อยู่นานๆ
ไม่ถูกปิดเสียก่อน
ขอขอบคุณในความร่วมมือครับ
ด่วน...... ขณะนี้
พระราชบัญญัติลิขสิทธิ์ (ฉบับที่ 2) พ.ศ. 2558
มีผลบังคับใช้แล้ว
ขอให้นักเรียนและคุณครูที่ใช้งาน
เว็บ thaigoodview ในการส่งการบ้าน
ระมัดระวังการละเมิดลิขสิทธิ์ด้วย
อ่านรายละเอียดที่นี่ครับ






{kind=link}
{kind=link}
{kind=link}